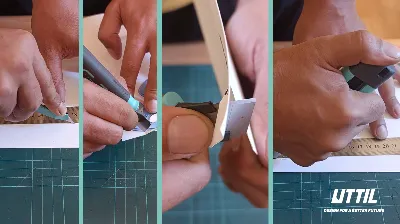
Anatomy of the Human Hand: A Mini Guide for Hand Tool Users
The hand makes both powerful
and precise movements possible through the harmonious operation of bones, muscle-tendons,
nerves and sensors (receptors that detect touch) at the fingertips. The
following brief tour summarises the basic biomechanics behind the control you
feel in everyday life by adding scientific terms alongside simple explanations.
1) Skeleton: 27 parts
"carrier" architecture
A hand
has eight carpal (wrist bones), five metacarpals (palm bones)
and 14 phalanges (finger bones). This structure transfers force from
the wrist to the tips of the fingers efficiently while allowing agile movements.
2) Muscle-tendon duo:
Power work and fine work
The muscles
of the hand are considered in two groups: extrinsic muscles (muscles starting
in the forearm, whose tendon extends to the hand and produce more than a "large
force") and intrinsic muscles (originating from the hand, fine-tuning and positioning of the fingers and small muscles). This division of labour
enables both the generation of power when cutting thick cardboard and power
production, as well as precision when managing millimetre curves in a model.
3) "Reel" system:
A2 and A4's critical role
On the inner face of the finger flexor tendons
(rope-like structures that serve to flex the fingers and transmit
muscle power to the fingers), pass through annular pulleys (ring-shaped
ligament bands) called tunnels. In particular, A2 and A4 pulleys
(the two most important pulley bands) hold the tendon close to the bone,
reducing the risk of bowstringing (spring beam-like popping out);
thus, minimising the loss of power in grip.
4) Thumb magic: Opposing
resisting (opposition)
The CMC
joint (trapeziometacarpal; the main multi-directional joint of the
thumb) at the base of the thumb enables opposition (the thumb opposing
the other fingers) to occur. This movement provides a large part of the precise grip and secure grip.
5) Grip types: Power or
precision?
The
classic classification distinguishes two basic strategies: power grip (high-force grip, where the fingers press the palm) and precision
grip (grip where the thumb-index/middle finger triad
adjusts the position with small forces). In everyday work, these two strategies
become fluidly intertwined.
6) Finger tip "sensors":
Mechanoreceptors (sensors for touch and mechanical stimulation)
in the skin, Meissner bodies (slight contact and sliding on
the surface), Merkel cells (constant pressure and edge differentiation),
Pacini bodies (high frequency vibration) and Ruffini end organs
(skin stretching and shape change). This network enables instantaneous adjustment
of the gripping force; it helps to run the blade over the line without pressing
more than necessary.
7) Friction, moisture
and "wrinkled finger" effect
Skin hydration (skin
moisturisation level)
modifies finger-surface friction and the slip threshold. Finger wrinkling
(temporary wrinkling of the skin surface ), seen after exposure to water,
can reduce the grip force required when holding wet objects; i.e. increase efficiency.
8) Nerve network: Median-Ulnar-Radial
triad
Sensory and motor control of the hand; median
nerve ( sensitive movement and sensation around the thumb-index and index finger
). It is provided by the ulnar nerve (the line that runs most of
the intrinsic muscles on the side of the little finger ) and by the
radial nerve (especially the hand dorsal sensory and finger extensor muscles).
This "wiring" coordinates the power-sensitivity balance.
Ergonomics Tip Boxes
- Precise
cutting:
Holding your wrist straight and bringing the blade close to the surface at
an angle of about 10-20° to the surface can create smoother lines in
one pass without going deeper in several slight passes.
- Long
line:
The use of a metal ruler and preferably a non-slip base increases
line continuity; fixing the ruler to the side of the body reduces unwanted
escapes.
- Grip
confidence:
Dry/sweaty hands, or gloves with TPE-coated bodies (e.g., MUK09 / VMUK09)
can reduce slippage by increasing friction.
- Blade
maintenance: Snap at the blunted segment at the tips safely breaks; at the trapezoidal tips, if blunted, immediately replace them to improve the quality
of cut and safety.
UTTIL & Connection with Mozart: Reflection of Science into Product
- Grip
and friction: NMUK09 / The HIPS body TPE + sheath on the
VMUK09 supports control (pen/pinch) and power grip.
- Choice
of mechanism: NMUK (automatic lock) for fast use in smooth work;
VMUK (screw clamping) for long lines for those who want to adjust
the blade stability manually.
- Blade
character (pocket types): PTUK07 (9 mm) and PTUK08 (18 mm)
families standard, 30° precision, segmentless and TiN-coated variants make it easy to choose the power-precise balance that
the job requires.
- Trapezoidal
applications:
PAUK06 (3-stage blade output) and PRUK06 (automatic
retraction) with "trigger-like" grips offer rhythmic and safe
advancement in warehouse/packaging processes.
- Sharpness
standard:
Mozart Blades (Solingen); 9 mm/18 mm snap-off, 30° precision, TiN coated,
segmentless and trapezoidal/hook blade options produce clean and
repeatable cuts.
Quick Selection Table
|
Business / Scenario |
Recommended grip |
Suitable UTTIL model(s) |
Tip/Knife recommendation (Mozart) |
|
Model -
typography - template |
Pencil or Pinch |
NMUK09, PTUK07-30, |
9 mm 30° precision snap-off, P1 and P2 blades |
|
Thick cardboard
- long box disassembly |
Power + Ruler |
NMUK09, NMUK04/05 |
18 mm snap-off / TiN
(long life, ease of friction) |
|
Narrow
area - mobile fast intervention |
Pinch |
PTUK07-SS, PTUK07-30 |
9 mm snap-off (standard or 30° precision) |
|
Warehouse/packaging
- series segments |
Trigger style |
PAUK06
/ PRUK06 |
Trapezoid / Hook end |
|
Deep and
smooth channel (single piece) |
Power |
VMUK03/04/05/09 |
Segmentless knife |
Short Security Summary
- It
is generally safer to make cuts away from the
body.
- Turning
off
the blade or locking it, or when the work is finished, reduces the possibility of accidents.
- Keeping
the working surface flat, dry and non-slip increases the feeling of
control.
- It
is recommended to accumulate the snap-off segments in a safe container and replace them immediately when the trapezoidal tips become
blunt.
- When
using the PRUK06, seeing the blade automatically retract at
the end of the cut provides an added level of safety.
Scientific Sources (Openly)
1. Standring S. Grey's Anatomy: The Anatomical Basis of Clinical
Practice. 42nd Edition. Elsevier; 2020. (basic reference for bones and joints
of the hand).
2. Moore KL, Dalley AF, Agur AMR. Clinically Oriented
Anatomy. 8th Edition. Wolters Kluwer; 2018. (Anatomy of the upper extremity
and hand).
3. Orthobullets. Flexor Pulley System - Hand. (Clinical and biomechanical importance of A2-A4 pulley structures and the bowstringing concept.)
4. Bosco F. Closed flexor pulley injuries: a literature review.
Orthopaedic Reviews. 2022;14(1).(Pulley injuries and function.)
5. Napier JR. The prehensile movements of the human hand.
J Bone Joint Surg Br. 1956;38-B(4):902-91313. (The classic source of the
power-sensitive grip classification.)
6. Abraira VE, Ginty DD. The sensory neurons of touch. Neuron. 2013;79(4):618-639. (Mechanoreceptor Types and Physiology of Touch)
7. Kareklas K, Nettle D, Smulders T. Water-immersion finger-wrinkling improves handling of wet objects. PLOS ONE. 2013. (Wrinkled fingers and grip efficiency.)